Agility Robotics╩Ūę╗╝ęų┬┴”ė┌ļpūŃÖCŲ„╚╦čą░lĄ─│§äō╣½╦ŠĪŻAgility Robotics 2015─Ļ│╔┴óė┌├└ć°Ż¼▓┐Ęųäō╩╝łFĻĀ║═╝╝ąg│╔╣¹
├ō╠źė┌ČĒ└šī∙ų▌┴ó┤¾īWĄ─äėæBÖCŲ„╚╦īŹ“×╩ęĪŻAgility Roboticsų┬┴”ė┌čą░l║═ųŲįņļpūŃÖCŲ„╚╦Ż¼▓óīóŲõį┌╔╠śIŁhŠ│ųąæ¬ė├ĪŻ
2017─ĻŻ¼Agility Robotics═Ų│÷┴╦ļpūŃÖCŲ„╚╦CassieŻ¼╦³ø]ėą╔Ž░ļ╔ĒŻ¼ų╗ėą┐Ķ▓┐║═ā╔ŚlŅÉ╦Ų°r°BĄ─═╚ĪŻ2019─ĻŻ¼Agility═Ų│÷┴╦
╚╦ą╬ÖCŲ„╚╦DigitŻ¼į┌CassieĄ─╗∙ĄA╔Ž╝ė╔Ž┴╦▄|Ė╔Īó╩ų▒█Ż¼▓óį÷╝ė┴╦Ė³ČÓėŗ╦Ń─▄┴”ĪŻ
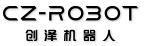
DigitÅ─╣”─▄│÷░l▀MąąįOėŗŻ¼ėą═¹į┌╬’┴„Lė“īŹ¼Fæ¬ė├ĪŻ▓╗═¼ė┌▓©╩┐ŅDäė┴”Atlasī”▀\äė─▄┴”Ą─╚▀ėÓįOėŗŻ¼Agilityų┬┴”ė┌īóÖC
Ų„╚╦═Č╚ļīŹļHæ¬ė├ĪŻDigitų„ę¬×ķ╬’┴„ł÷Š░įOėŗŻ¼┐╔ęį─├Ų║═Čč»B18kgųžĄ─ŽõūėŻ¼▀MąąęŲäė░³╣³ĪóąČžøĄ╚╣żū„Ż¼ Ī░║¾ę╗
╣½└’Ī▒┼õ╦═╣”─▄ę▓š²į┌ķ_░l«öųąĪŻAgility╣½╦Šäō╩╝╚╦šJ×ķŻ¼┼cąĪ▄ćŽÓ▒╚Ż¼ļpūŃÖCŲ„╚╦į┌╬’┴„Lė“Ģ■š╣¼F│÷Ė³┤¾Ą─ņ`╗ŅąįĪŻ
Å═ļsĄžą╬ūį▀mæ¬ŲĮĘĆ┐ņ╦┘ąąū▀ U-SLAMęĢėXī¦║Įūįų„┬ĘÅĮęÄäØ ╩ųč█ģfš{▓┘ū„Š½£╩ņ`╗ŅĘ■äš ČÓ─ŻæBŪķĖąĮ╗╗źĘ┬╚╦╣▓Ūķ▒Ē▀_ äėæBūŃ═╚┐žųŲūįŲĮ║Ō┐╣Ė╔ö_
ÖCŲ„╚╦HUBOęįų▒═╚æBąąū▀,Ė³ĮėĮ³╚╦Ą─▓ĮæB;╚½╔Ēėą34éĆūįė╔Č╚,ū¾ėę╩ųĘųäeėą3,4éĆ╩ųųĖ,┐╔ęį▓┘┐vĘĮŽ“▒P,┼╩┼└╠▌ūėĄ╚,│¼▀^Atlas┌AĄ├┴╦DARPAÖCŲ„╚╦╠¶æ┘É╣┌▄Ŗ
▓©╩┐ŅDäė┴”╣½╦Šų┬┴”ė┌čą░lŠ▀ėąņ`╗Ņ▀\äė─▄┴”Ą─ČÓūŃÖCŲ„╚╦,ų„ę¬░³└©╦─ūŃÖCŲ„╣ĘSpotŻ©ė├ė┌╣żśIč▓ÖzĄ╚ł÷Š░Ż®║═ĦÖCąĄ▒█Ą─ęŲäėÖCŲ„╚╦Stretch
Ę┬╚╦ÖCŲ„╚╦Ą─ÖCąĄśŗįņ,“īäė║═┐žųŲĄ─Å═ļs│╠Č╚Č╝▀hĖ▀ė┌¼FėąĄ─ÖCŲ„╚╦;īŹ¼Fę╗Č©│╠Č╚Ą─šJų¬║═øQ▓▀ųŪ─▄,╔ąąĶę¬╚╦╣żųŪ─▄▄øė▓╝■Ż©┤¾─XŻ®Ą─Ė▀Č╚░lš╣
Ņ^▓┐╩╣ė├╚²ŅwAutopilot özŽ±Ņ^ū„×ķĖąų¬ŽĄĮy,Left/RightPillarCameraū¾╝ń/ėę╝ńözŽ±Ņ^║═FisheyeCamera ųąčļ¶~č█özŽ±Ņ^,╠ß╣®┤¾ė┌180Č╚¾wŪ░ł÷Š░Ė▓╔w,
CyberOneÖCŲ„╚╦┤Ņ▌dĄ─Mi-Sense╔ŅČ╚ęĢėX─ŻĮM,«aŲĘį┌£y┴┐ĘČć·ā╚Š½Č╚Ė▀▀_1%,ØMūŃ╝ż╣Ō░▓╚½ Class1 ś╦£╩,ōĒėą═Ļš¹Ą─╚²ŠS┐šķgĖąų¬─▄┴”
WALKERX▓╔ė├╗∙ė┌ČÓ─┐ęĢėXé„ĖąŲ„Ą─╚²ŠS┴ó¾węĢėXČ©╬╗,▓╔ Coarse-to-fineĄ─ČÓīėęÄäØ╦ŃĘ©,īŹ¼FäėæBł÷Š░Ž┬╚½ŠųūŅā×┬ĘÅĮūįų„ī¦║Į
Č©╬╗╣”─▄ų„ę¬æ¬ė├ė┌╝ė╣żįOéõ╣żŠ▀Č╦Ą─┬ĘÅĮę²ī¦;╬’┴„ś╦║×ūx╚Ī║═ūųĘ¹ūRäe╩ŪūRäe╣”─▄ūŅų▒ĮėĄ─Ę■äšī”Ž¾;£y┴┐╣”─▄ų„ę¬æ¬ė├ė┌ī”─┐ś╦╬’¾wĄ─Ė▀╦┘ Ė▀Š½£y┴┐
ę╩─ŽŠWĖ±╗»App╩Ūę╩─Ž┐h╔ńĢ■ų╬└Ēą┼ŽóŲĮ┼_Ą─╩ųÖCæ¬ė├,┐╔ęį×ķ╩│ŲĘ╦ÄŲĘ▒O╣▄┤ŅĮ©ą┬─Ż╩Į,š{äėśI╬»Ģ■,╬’śI╣½╦Š,ąĪģ^ŠWĖ±åT,ĮųŽ’ŠWĖ±åTĄ╚ģó┼c╩│ŲĘ╦ÄŲĘ░▓╚½ų╬└Ē
PLC┐žųŲŲ„ė├ė┌łAų▄▀\äė╗“ų▒ŠĆ▀\äėĄ─┐žųŲ;ŪČ╚ļ╩Į┐žųŲŲ„║Ł╔wÅ─║åå╬ĄĮÅ═ļsĄ─Ė„ĘN▀\ė├;ŠWĮj╩Į┐žųŲŲ„┼c╦┼Ę■“īäė ĮyĄ─µ£Įė╩Ū▓╔ė├Ė„ŅÉ╣żśI┐éŠĆą╬╩Į
ųąć°ÖCŲ„ęĢėX╝╝ągį┌╣żśIŅIė“æ¬ė├▌^ČÓ,«aśIĘų▓╝┼cųąć°ųŲ įņśI░l▀_Ąžģ^Ą─Ąž└Ē╬╗ų├┬ōŽĄ▌^Šo├▄,į┌ÅV¢|╩ĪĪóĮŁšŃ£¹Ą╚ Ąžģ^▌^╝»ųą,šQ╔·┴╦ČÓéĆųąć°ÖCŲ„ęĢėX«aśIµ£╔Žųąė╬²łŅ^Ų¾śI
┼cRV╝░Ųõ╦¹Š½├▄£p╦┘Ų„ŽÓ ▒╚,ųC▓©£p╦┘Ų„╩╣ė├Ą─▓─┴Ž,¾wĘe╝░ ųž┴┐┤¾Ę∙Č╚Ž┬ĮĄ;Š½Č╚═∙═∙▓╗╝░ųC▓©£p╦┘Ų„,ę╗░Ńæ¬ė├ė┌ČÓĻP╣ØÖCŲ„╚╦ųąÖCū∙